Episode 5 : Les associations de moteurs et le respect du cahier des charges
Fin mars/début avril 2004, j’ai fini mes écrits de concours et je m’interroge sur l’interconnexion de plusieurs moteurs astroïdaux à octogone déformable.
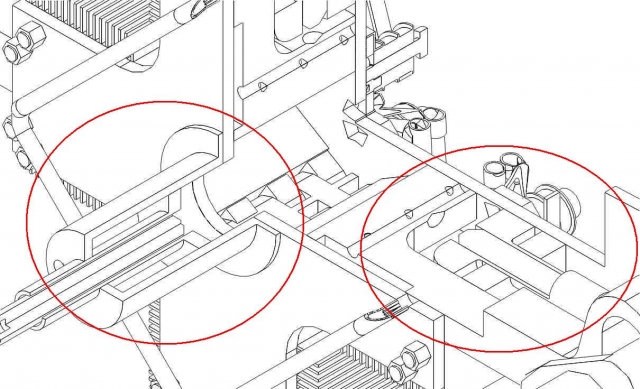
En longitudinal, c’est correct.

Par contre en radial, ça se passe mal : des creux dégradent fortement la compacité.
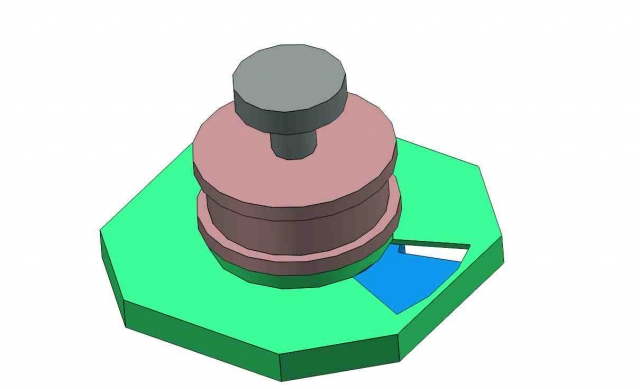
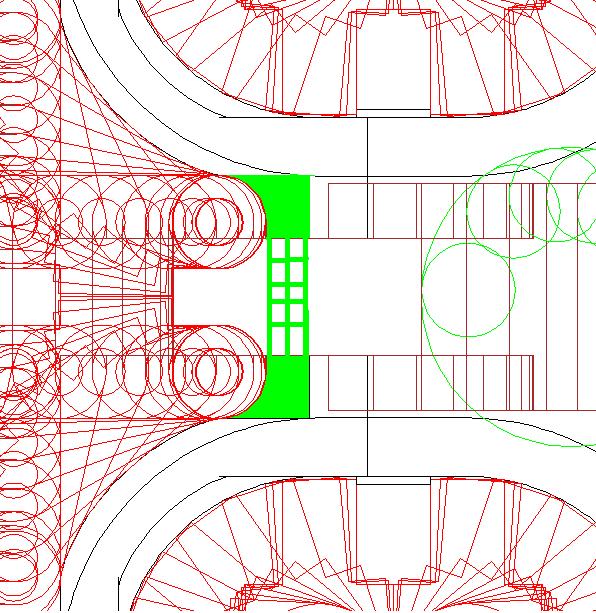
Le carter est convexe, de forme sensiblement circulaire. Je souhaite valoriser ces creux, en balayant du volume avec un autre type de moteur. Il faudrait adjoindre des « moteurs-cylindre », de forme concave, sensiblement circulaires.
Il existe des dizaines de variantes de ce genre de moteurs, le plus souvent à pistons coaxiaux, lesquels n’ont jamais eu de succès. Dans mes recherches antérieures, je n’ai pas rencontré de moteurs à pistons rotatifs non coaxiaux, et c’est une voie dans laquelle j’ai intuitivement envie d’aller.

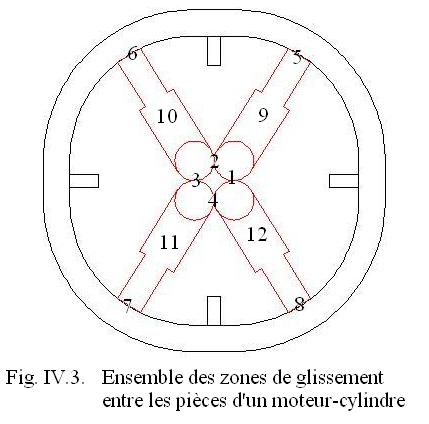
Je choisis 2 paires de pistons à mouvement alterné contrarotatif pour ces moteurs-cylindre. C’est une architecture nouvelle qui répond aussi au cahier des charges, notamment en ce qu’elle est équilibrée et aspire des volumes proportionnels au carré des dimensions radiales du moteur. Les cycles 4 temps y sont aisément réalisables.

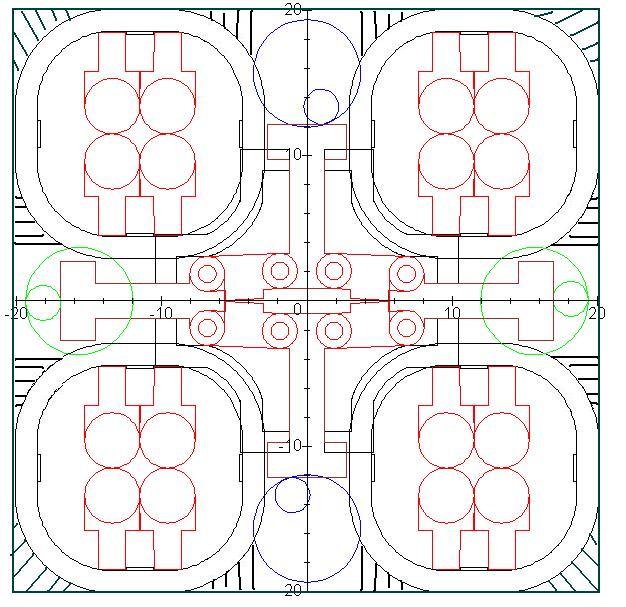
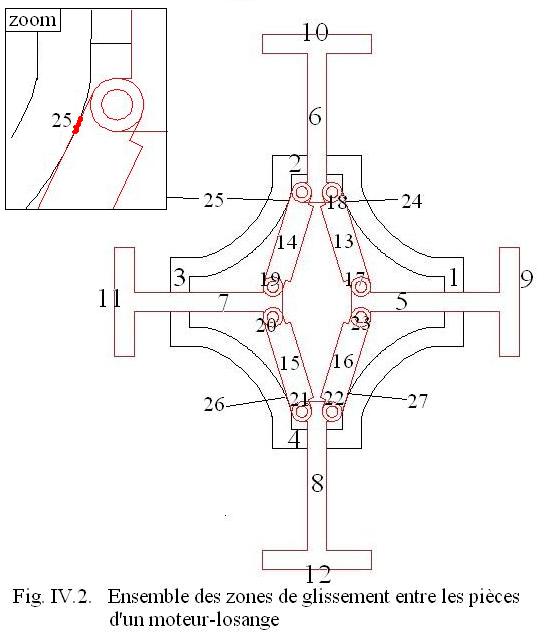
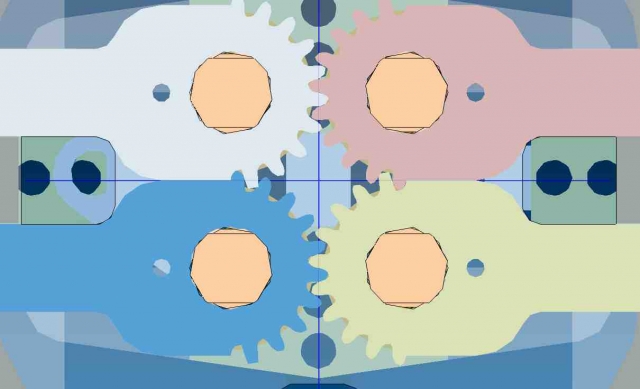
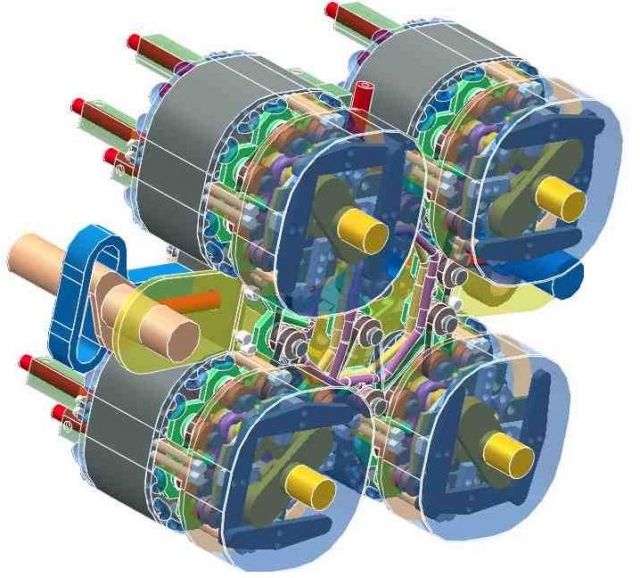
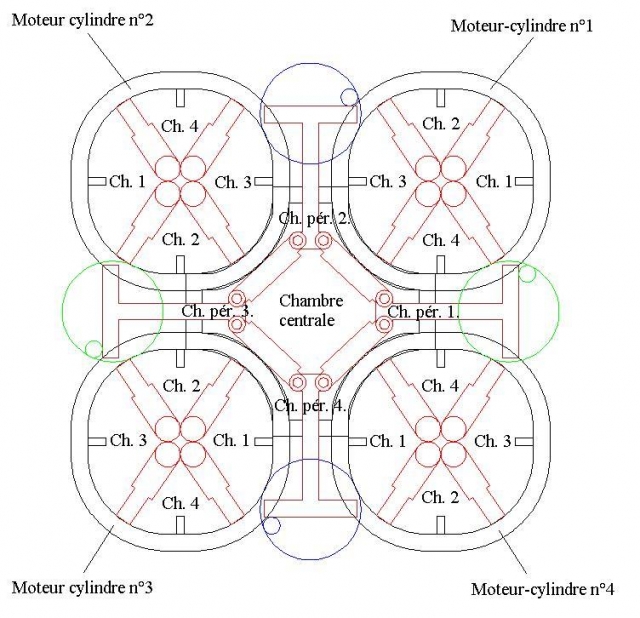
En mai 2004, je reprends et perfectionne mon programme Maple : je fais dessiner 4 moteurs-cylindre (les futurs MPRBC) autour de mon moteur astroïdal (le futur POGDC dans la version « carter périphérique à glissière »). Les premières images sont encore un peu hâtives : moteurs pas bien centrés, pistons filaires.
Puis le dessin s’affine, je symétrise

et je donne des épaisseurs aux pistons

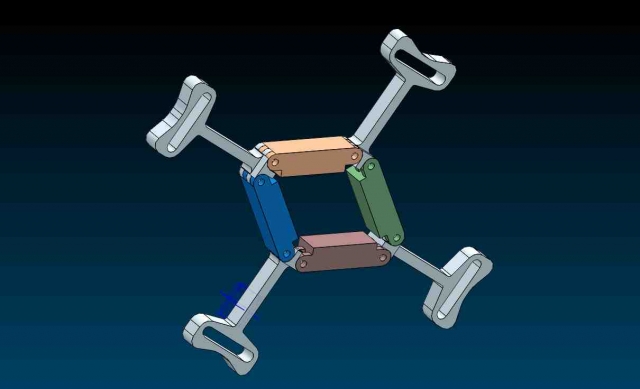
Pour actionner les moteurs-cylindre, j’ajoute un mécanisme 4-barres avec 4 manivelles contrarotatives au centre du moteur.
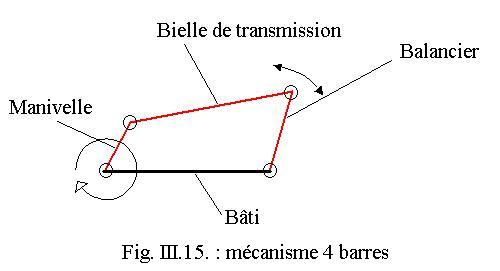
La symétrie à 4 quadrants équilibre naturellement l’engin, mais ça ne me satisfait pas complètement : c’est encore un embiellage archaïque et je devrai m’attacher à trouver mieux que ça . Néanmoins, je fais superposer les dessins dans différentes positions
Sans mécanisme 4-barres
Avec mécanime 4-barres
J’évalue sommairement « sur Paint » l’enveloppe du mouvement du mécanisme 4-barres
Et Je dessine les différentes positions juxtaposées

Voir l'enchaînement des cycles 4 temps
C’est’y pas bô !!
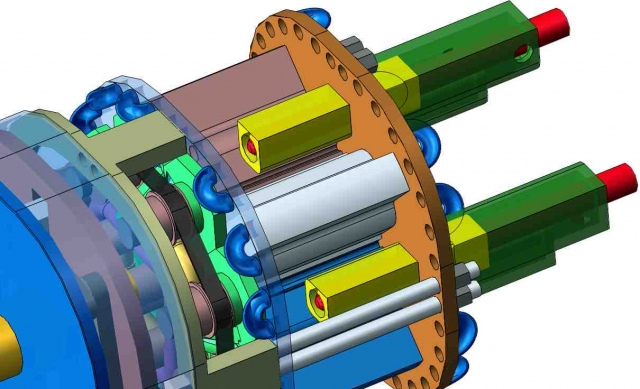
Juin 2004 : nous sommes à la veilles des oraux du CAPES et l’Agreg et je dispose d’un moteur parfaitement équilibré, à peu près 4 fois plus compact que les moteurs à pistons/bielle/vilebrequin.
Dans cette version,
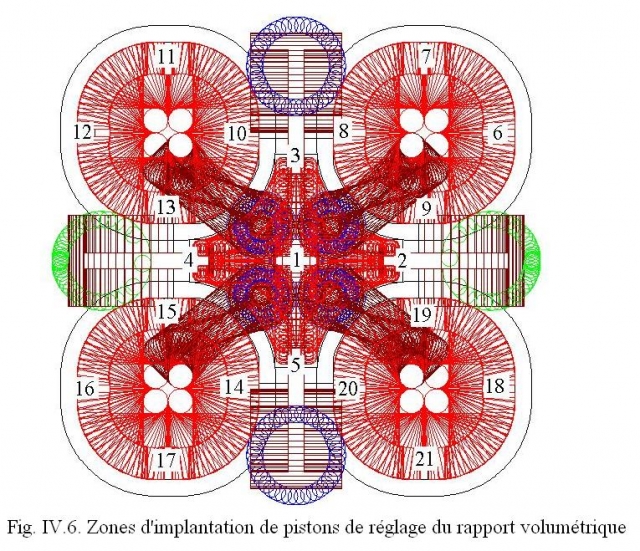
c’est l’équivalent d’un 22 cylindres, 6L de cylindrée pour moins de 50 cm de côté et 10 cm de profondeur.
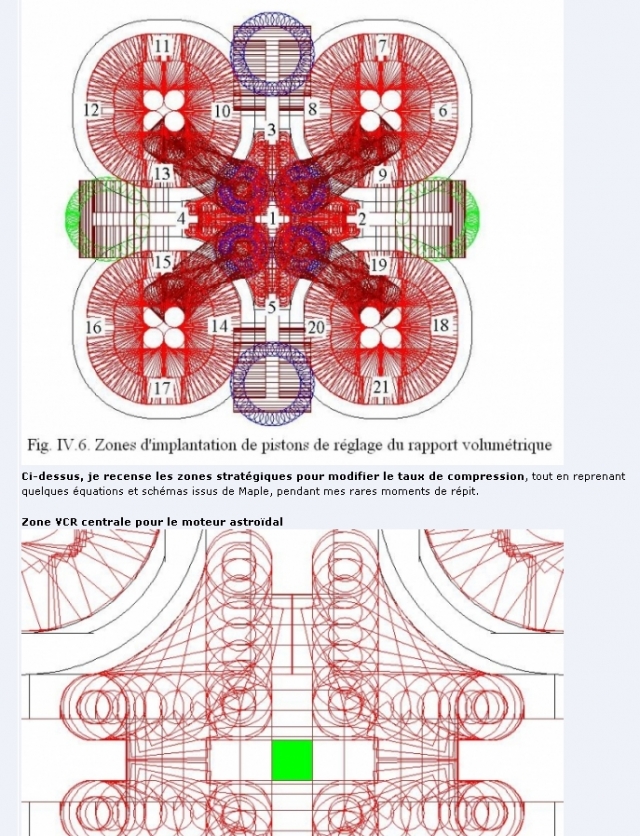
Je sais que la volumétrie est différente d’une chambre à l’autre et que c’est la clé de la cylindrée variable (par analyse combinatoire des possibilités de chambres activées et désactivées procurant des paliers de puissance très fins, avec une démarche totalement inédite et originale).
A ce stade, je réponds donc dans le cahier des charges :
* A la fonction n°1 : compacité multiplié par au moins 4
* A la fonction n°2 : puissance mini 70 Ch.
* A la fonction n°3 : paliers de puissance partielle suffisamment petits
* Pas très bien à la fonction n°4 : j’ai des cycles 4 temps, mais ils ne sont pas « super-optimisés » car la cinématique de mes mécanismes sinus ou 4-barres est hypercontrainte. A travers ces choix de mécanismes, je reproduis des erreurs que je souhaite pourtant combattre.
* J’ai laissé de côté les fonctions n°5 à 7 : calage variable des soupapes, savoir-faire existants et VCR.
* Et la fonction 8 : équilibrage parfait et intrinsèque du moteur, est respectée.
C’est déjà au-delà de mes espérances du printemps 2003. Pour 1 an de recherches, menées en parallèle d’expériences et formations professionnelles diverses, ce n’est pas si mal.
voir l'animation ici
De plus, je n’ai pas dit mon dernier mot : pour le calage variable et le taux de compression, j’ai des idées. En attendant, il faut aller à Paris passer les épreuves orales du CAPES et de l’Agrégation de Sciences Physiques.

 (cette année-là, il devait y avoir 800 admis). Cela laisse présager quelques perspectives favorables en ce qui concerne l’Agrégation…
(cette année-là, il devait y avoir 800 admis). Cela laisse présager quelques perspectives favorables en ce qui concerne l’Agrégation…