Gaston a écrit :Les moteurs asynchrones ne sont pas forcément bien adaptés à la traction.
Leur rendement est (un peu) inférieur, leur pilotage est beaucoup plus complexe et leur courant de démarrage est très important (ou si on limite le courant de démarrage, le couple est plus faible).
En fait, c'est le type de moteur le plus adapté (avec le SRM qui commence à arriver), raison pour laquelle on ne trouve à peu près plus que ça dans les trains récents, trams, métros, bateaux, etc.
Le pilotage est complexe mais ce n'est pas un problème pour l'électronique moderne. Pour le SRM, le pilotage est encore plus complexe, mais le moteur est plus petit, moins cher et plus performant, ce qui compense largement. La complexité, c'est surtout du code... ce qui ne coûte rien en frais de production, seulement en développement. Si tu remplaces un kilo de cuivre par du code, tu gagnes du fric. Un DSP plus puissant pour piloter le moteur coûte moins cher que 500gr de cuivre...
Donc, pour de la traction, ce qui est intéressant, c'est le rendement, la puissance et le couple du moteur sur toute la plage de vitesses utile, et sur une grande plage de charge. Et le rapport de tout ça au prix et au poids.
C'est très différent d'une application comme une pompe où le moteur va toujours tourner avec une vitesse et une charge à peu près constante.
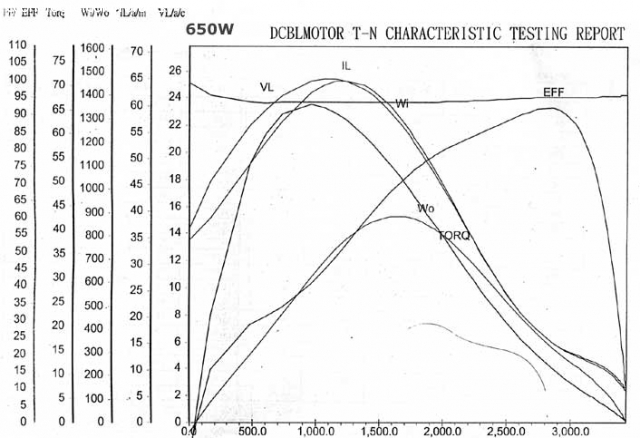
Donc, le brushless a un excellent rendement sur une petite plage de vitesses, en-dehors de cette plage, il est à chier (vraiment). Mais le couple est bon. L'extraction des terres rares (néodyme) génère une pollution apocalyptique, en plus c'est cher.
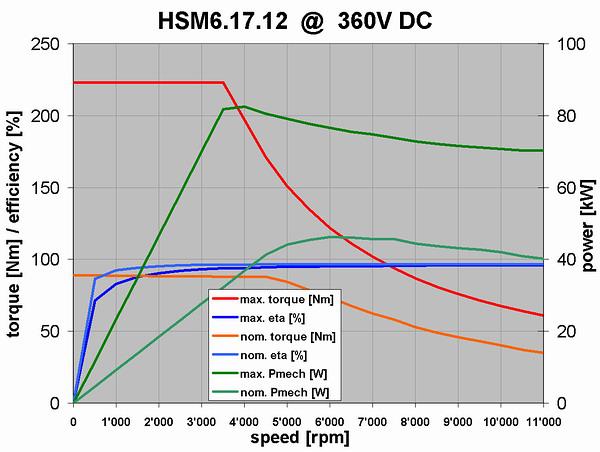
L'asynchrone a un rendement maxi un peu moins bon, mais il reste bon sur une grande plage de vitesses, coûte peu cher, mais est plus lourd et a moins de couple. En montant la fréquence, il faut plus d'engrenages en sortie, mais le moteur devient plus performant.
Le SRM, c'est un peu comme l'asynchrone, en mieux : le rotor est un bout de ferraille qui coute rien, c'est plus léger, plus de rendement et plus de couple sur une plus grande plage de vitesses, etc. Mais c'est nouveau, ça va se démocratiser.
Le pire de tout est bien sûr le moteur roue direct sans réducteur.
> les moteurs asynchrones sont beaucoup plus lourd que les moteurs universel!
Le moteur universel (ie, série sans aimant) :
- très bon rapport puissance/poids (pour l'électroportatif c'est essentiel)
- très peu cher
- très bon couple au démarrage (utile pour une perceuse)
- rendement plus que à chier (50-60% dans les conditions optimum)
- durée de vie courte
- surchauffe rapide (quand t'as un moteur de 0.8kW dans ta perceuse et qu'il a 60% de pertes, ça fait beaucoup de watts à évacuer, donc faut souffler dessus très fort...)
Sinon +1 chatelot.



 [/url]
[/url]

